Sección 8 Datos espaciales
La estadística espacial tiene aplicaciones en áreas como climatología, ecología, salud y bienes racíces, esto se debe a que en estas áreas es común contar con información espacial que deseamos modelar y es necesario incorporar el efecto de la autocorrelación espacial en la estimación y predicción.
La autocorrelación espacial se puede expresar informalmente como (primera ley de la geografía de Tobler):
Todo esta relacionado con todo, pero las cosas cercana
están más
relacionadas que las lejanas.
Usualmente la estadística espacial se divide en tres ramas:
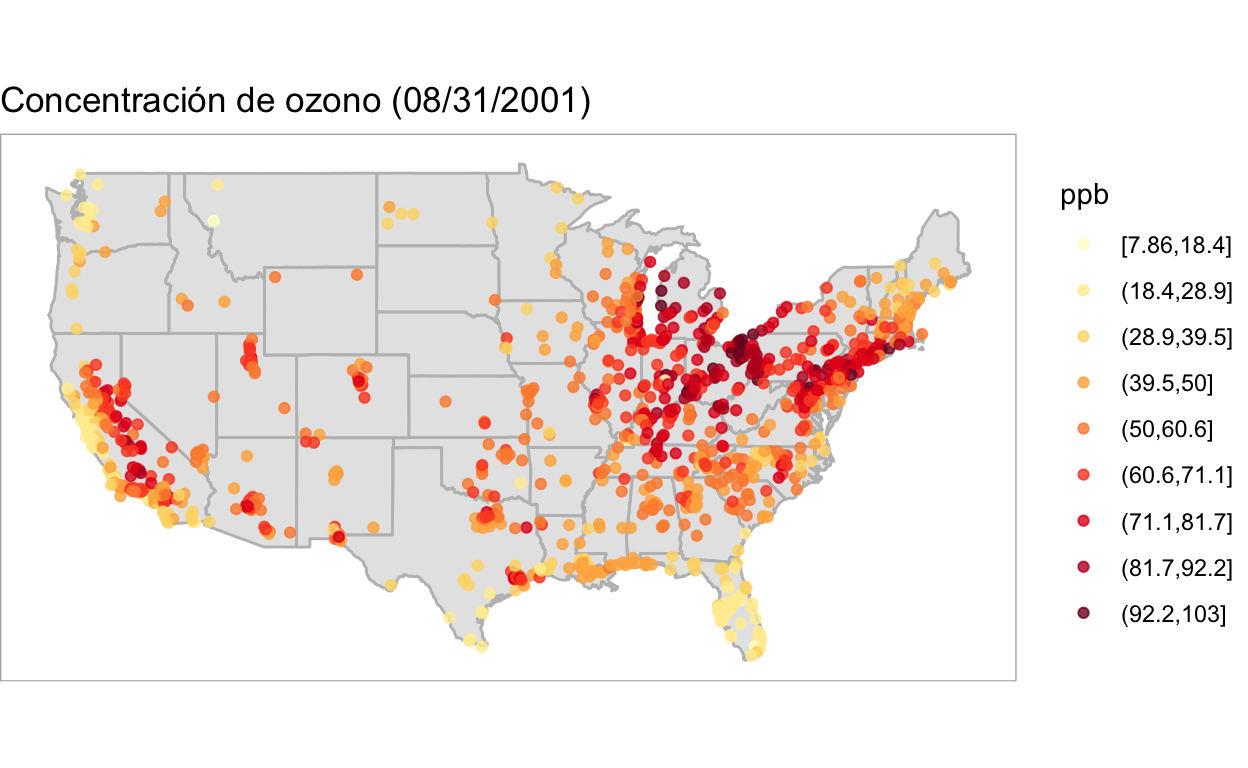
- Análisis de datos de variación continua comprende procesos estocásticos cuyos valores pueden ser conocidos en todos los puntos del área de estudio.
El proceso \(Y(s)\) es un vector aleatorio en una ubicación \(s \in \mathbb{R}^r\) donde \(s\) varía de manera continua sobre el dominio \(\mathcal{D} \subset \mathbb{R}^r\) (usualmente r= 2).
 ¿Qué preguntas interesantes puedes
responder?
¿Qué preguntas interesantes puedes
responder?
- Análisis de datos de variación discreta (datos sobre áreas): Se refiere a la distribución de eventos cuya localización se asocia a zonas delimitadas por polígonos.
\(\mathcal{D}\) es nuevamente un subconjunto fijo de \(\mathbb{R}^r\), pero en este caso \(\mathcal{D}\) esta particionado en un número finito de unidades de area con fronteras bien definidas.
#> Regions defined for each Polygons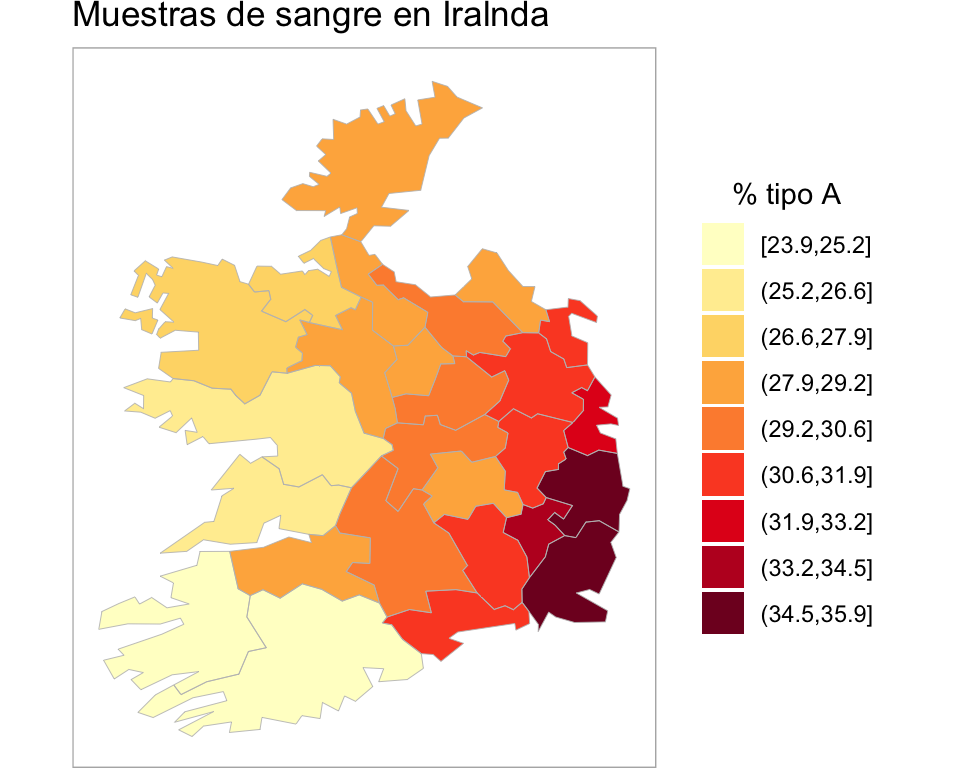
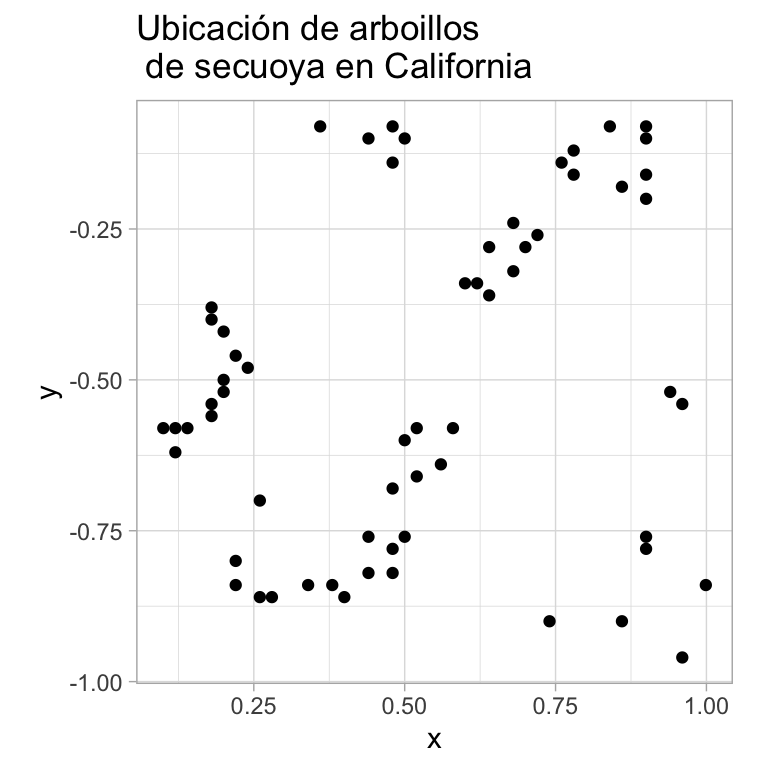
- Análisis de procesos espaciales de puntos: Conjunto de puntos distribuidos en un área fija cuya ubicación fue generada por un mecanismo estocástico.
\(\mathcal{D}\) es aleatorio y sus índices indican la ubicación de eventos aleatorios que son el proceso puntual.
Supongamos \(Z_1,...,Z_n\) variables
aleatorias i.i.d. Gaussianas, con media \(\mu\) y varianza conocida \(\sigma_0^2\).
Entonces: \[\hat{\mu}=\frac{1}{n}\sum_{i=1}^nZ_i\] es un estimador insesgado para \(\mu\) y \[Var(\hat{\mu})=\frac{\sigma_0^2}{n}\]
Supongamos ahora que \(Z_1,...,Z_n\) son v.a. Gaussianas con media \(\mu\) desconocida y varianza \(\sigma_0^2\), supongamos además que las variables están correlacionadas positivamente: \[Cov(Z_i, Z_j)=\sigma_0^2\rho^{|i-j|}\] donde \(0<\rho<1\).
- Sea \(\hat{\mu}=\frac{1}{n}\sum_{i=1}^nZ_i\). ¿\(\hat{\mu}\) es un estimador insesgado para \(\mu\)?
Sí
No
No se puede saber
- \(Var(\hat{\mu})\) es
Menor a \(\frac{\sigma_0^2}{n}\).
Mayor a \(\frac{\sigma_0^2}{n}\).
Igual a \(\frac{\sigma_0^2}{n}\).
No se puede saber.